|
I am a Ph.D. student in Columbia University Computer Science Department. Before entering Columbia, I studied in University of Illinois at Urbana-Champaign Ph.D. program and earned B.S. from University of Michigan and Shanghai Jiao Tong University. I am working on the robotic manipulation under the supervision of Prof. Yunzhu Li. I was also lucky to work under the supervision of Prof. Katie Driggs-Campbell, Dr. Dale McConachie, Prof. Dmitry Berenson, and Prof. Audrey Sedal. yixuan [at] cs [dot] columbia [dot] edu / GitHub / LinkedIn / X / GScholar |

|
|
[May. 2025] I will start an internship at Meta FAIR. See you in Menlo Park!
|
|
I'm interested in robotics, perception, manipulation and robot learning. Here are lists of research projects I have done. |
|
|
Yixuan Wang, Guang Yin, Binghao Huang, Tarik Kelestemur, Jiuguang Wang, Yunzhu Li CoRL, 2024 website / paper / code / bibTex |
|
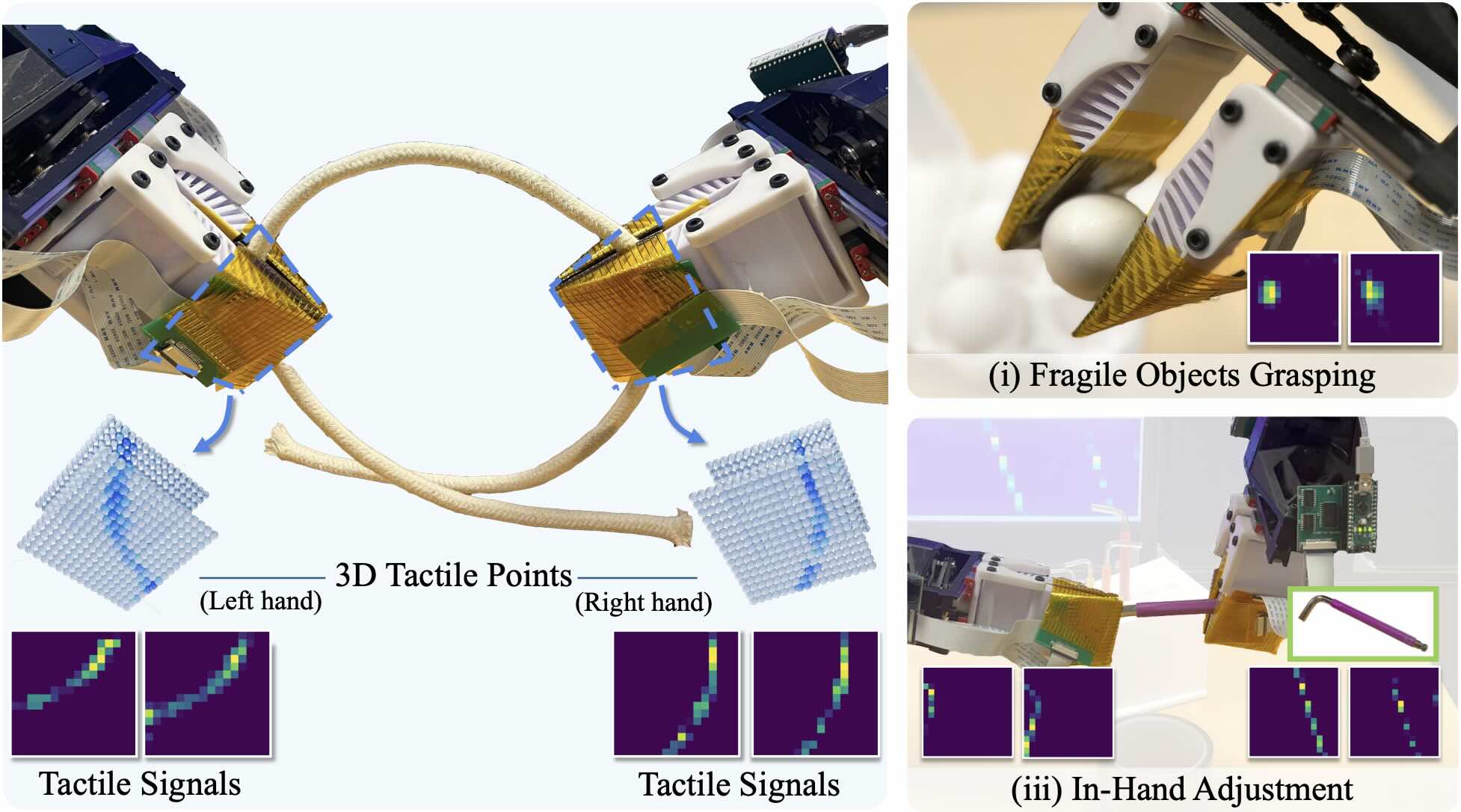
Binghao Huang, Yixuan Wang, Xinyi Yang, Yiyue Luo, Yunzhu Li CoRL, 2024 website / video / hardware guide / paper / bibTex |
|
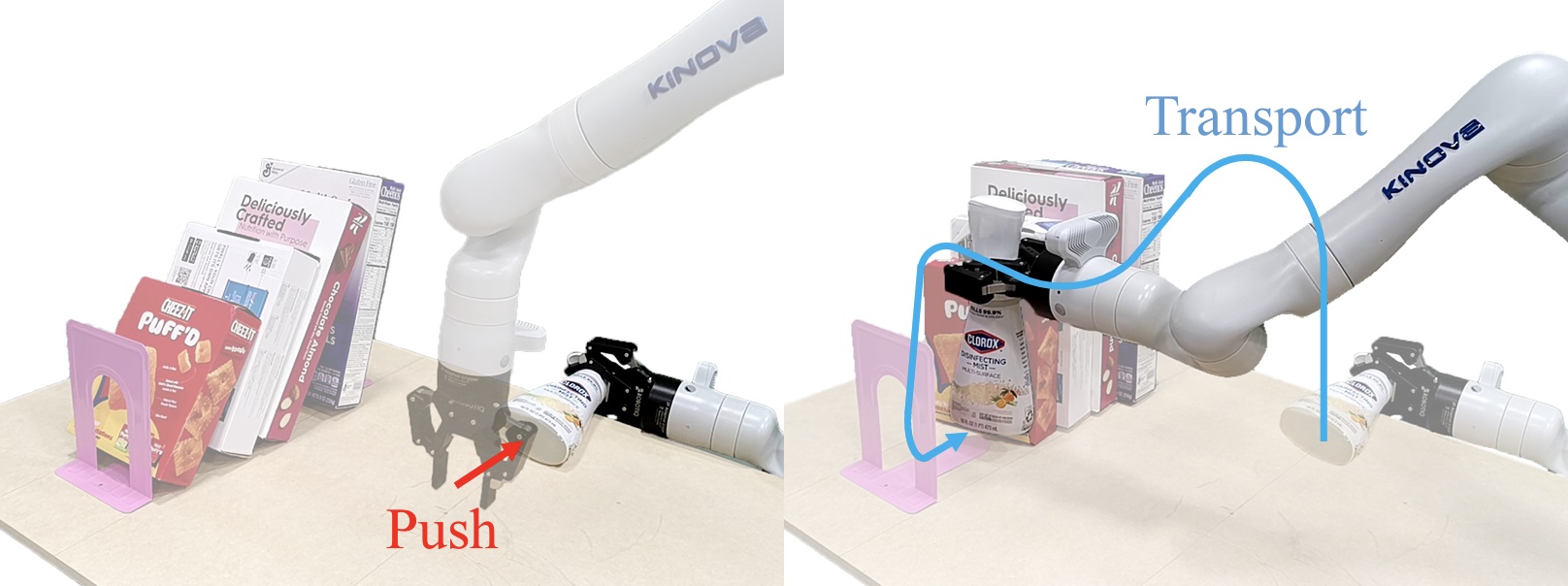
Yixuan Wang*, Mingtong Zhang*, Zhuoran Li*, Tarik Kelestemur, Katherine Driggs-Campbell, Jiajun Wu, Li Fei-Fei, Yunzhu Li CoRL, 2024 Oral Presentation website / paper / code / bibTex |
|
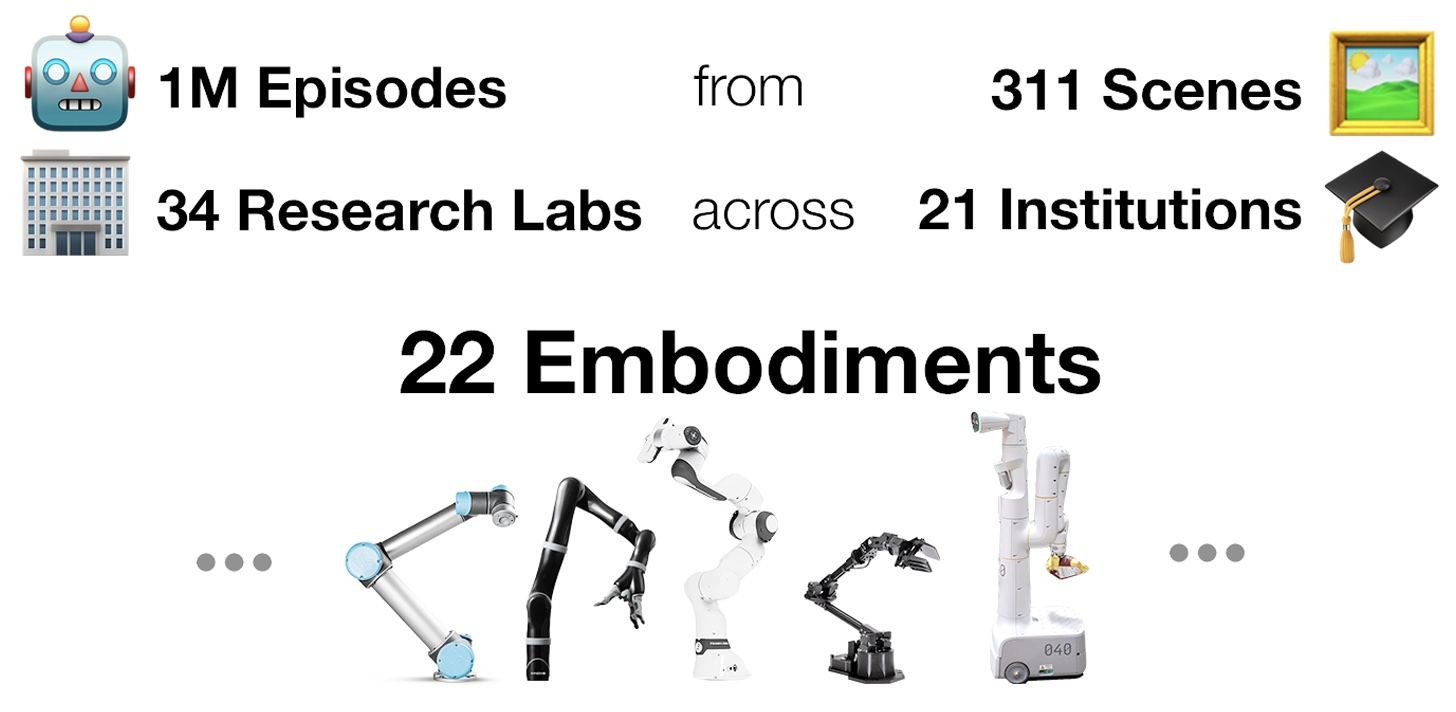
Open X-Embodiment Collaboration ICRA, 2024 Best Conference Paper Award project / paper / blogpost / code / data / bibTex |
|
|
Bo Ai*, Stephen Tian*, Haochen Shi, Yixuan Wang, Cheston Tan, Yunzhu Li, Jiajun Wu RSS, 2024 website / paper / bibTex |
|
Haonan Chen, Yilong Niu*, Kaiwen Hong*, Shuijing Liu, Yixuan Wang, Yunzhu Li, and Katherine Driggs-Campbell CoRL, 2023 Finalist - Best Paper/Best Student Paper Awards (Top 1%) project & video / paper / code / bibTex |
|
Yixuan Wang*, Yunzhu Li*, Katherine Driggs-Campbell, Li Fei-Fei, Jiajun Wu RSS, 2023 Best Paper Award at IROS 2023 Workshop on Learning Meets Model-based Methods for Manipulation and Grasping [Link] website / paper / code / bibTex |
|
Yixuan Wang, Dale McConachie, Dmitry Berenson ICRA, 2021 paper / video / code / talk |
|
During my spare time, I enjoy building some small tools for research and daily life. Here are some of them. OpenAI TTS: A GUI to convert text to speech using OpenAI API PyTorch MPC: A modular library for MPC implementation using PyTorch Video Compressor: A script wrapping around ffmpeg to convert video and compress video to a target file size. It is handy and can keep video as clear as possible when submitting video material to conference. |
|
Conference Reviewer: ICRA, IROS, AAAI, CVPR, CoRL Journal Reviewer: Autonomous Robots, Robotics and Automation Letters Teaching Assistant: Robot Learning, Senior Design Lab, Random Process @ UIUC. Honor Physics I, Honor Calculus II @ SJTU |
|
Harriett & Robert Perry Fellowship, 04/2023. Silver Medal for Capstone Design, 08/2021. Shanghai Excellent Gradudate (Top 5%), 08/2021. University Honors, 09/2019, 04/2020. Dean's List, 12/2019. Jackson and Muriel Lum Scholarship, 09/2019. SJTU Undergraduate Excellent Scholarship (Top 10%), 08/2018, 08/2019. Bronze Medal in University Physics Competition, 01/2019. National Encouragement Scholarship, Ministry of Education of China, 09/2018. The John Wu & Jane Sun Sunshine Scholarship, 09/2018. SJTU Outstanding Student, 09/2018. The Yu Liming Scholarship, 12/2017. |
|
I learned Go when I was a kid, and I earned Go 3 dan (amateur). I am a super fan of Cantonese pop songs and would like to learn speaking Cantonese.
|
